
По сравнению с такими шустрыми средствами, как противорадиолокационные ракеты (Anti Radar Missile) беспилотник выглядит сущим недоразумением. Однако, это всего лишь следствие инерции мышления, когда на самом деле главный недостаток БЛА по сравнению с ракетой — низкая скорость, становится преимуществом в следующих случаях:
- нужно хорошенько рассмотреть цель;
- можно позволить себе прогуляться для того чтобы выбрать что-либо подходящее в качестве цели, и достаточно долго — скажем, в течение суток (барражирующий боеприпас);
- за счет низкой радиальной доплеровской скорости и скромного значения ЭПР можно стать малозаметным для обнаружения.
Слово «автоматический» означает, что обнаружение наземных радиолокационных станций (РЛС) будет происходить без участия оператора, или другими словами — решение будет приниматься бортовым компьютером дрона самостоятельно, быстро и без потребности в ненадежном канале передачи данных. В реальности, бортовая автоматическая визуальная подсистема БЛА может существенно снизить нагрузку на оператора, выдавая ему на одобрение картинки с ожиданием резолюции «похоже» или «не похоже».
Перед тем как перейти к сути, немного теории.
Двумерное преобразование Фурье
В теории обработки сигналов мы привыкли к тому, что данные являются функцией времени. Но это совсем не обязательно — например, в нашем случае можно рассматривать двумерное (2D) преобразование Фурье изображения, где время не имеет никакого смысла. В результирующем спектре мы будем иметь дело с пространственными частотами, физический смысл которых говорит о том, как быстро (с какой частотой) меняется изображение.
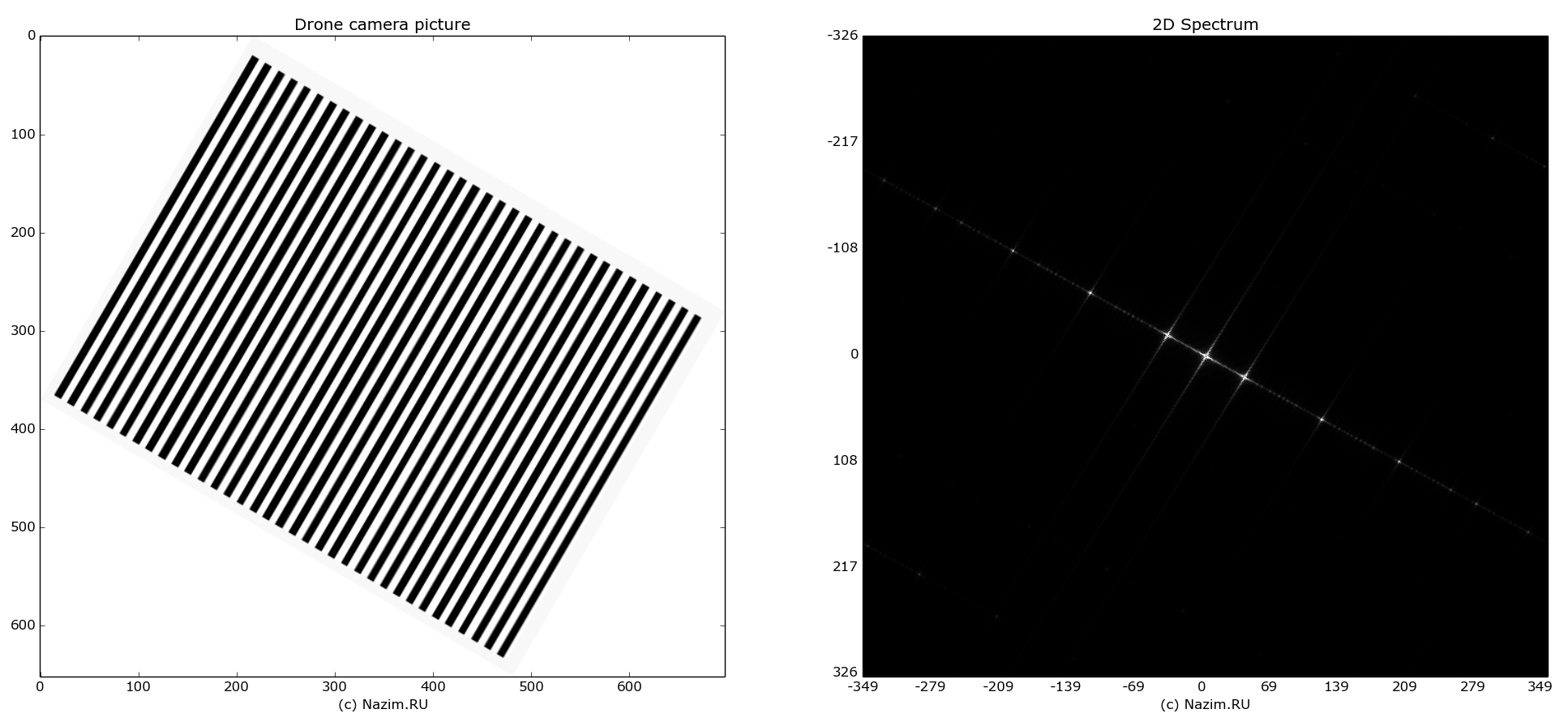
Слева — исходное регулярное изображение (повернутая решетка), справа — ее двумерный спектр
О чем говорит диагональный максимум спектра на этой картинке? Точнее, его координаты — по оси X они несколько больше чем по оси Y. Это соотношение подсказывает, что в исходном изображении «сигнал» по оси X меняется чаще, чем по оси Y. Максимум спектра возникает, когда в исходном изображении присутствуют некие периодические данные, или регулярные структуры. Если не рассматривать животных (тигры и зебры), а также насекомых, у которых в раскраске такие периодические структуры возникают сплошь и рядом (пчелы), то для оставшегося царства растений можно сделать вывод, что регулярные структуры ему совсем не свойственны.
В общем, мы подбираемся к тому, что регулярность — это рукотворное свойство, и тем более для антенных систем РЛС, где точное соблюдение периодичности антенной решетки абсолютно необходимо для ее правильной работы.
Пока мы еще на простой картинке, определимся с метриками. Очевидно, что период наблюдаемой решетки РЛС это не время, а пространственная координата: например, сантиметры или миллиметры. В нашем случае удобно пользоваться пикселями, поскольку именно с такой метрикой мы получаем картинку. Размерность пространственной частоты — величина обратная пространственной координате — 1/см или 1/мм. Раз уже мы условились дружить с пикселями, тогда 1/px.
Размер исходной выборки — это размер исходного изображения в пикселях, для картинки выше это будет Nx x Ny = 698 x 652. Не пытайтесь проверять меня и прикладывать линейку к экрану (более продвинутые могут скопировать картинку себе и проверить размер): при публикации размеры меняются. Будем ориентироваться на размеченные оси абсцисс и ординат; обратите внимание что на графике справа ноль расположен в центре и мы смотрим на комплексно-сопряженный спектр (центральная симметрия).
К чему были эти метрики? Нам нужен период сигнала (решетки), который мы будем извлекать из локальных максимумов пространственных частот Fx, Fy. Периоды будут определяться так:
|
1 2 |
Tx = Nx / Fx Ty = Ny / Fy |
Проверочное упражнение: минимальной частоте Fx = 1/px будет соответствовать период 698px, что логично, поскольку это один период на всю ширину картинки. Максимальной частоте Fx = (698/2) 1/px соответствует период 1px, если мы бы смогли нарисовать такое на экране.
(По хорошему и по классике, надо бы оперировать относительными частотами в диапазоне [0…1] с шагом 1/Nx, 1/Ny, но мы не делаем этого для удобства работы с картинкой — что видим на оси, то и есть частота. Для относительных единиц это не имеет никакого значения)
Теперь, когда мы вооружены метриками, определим каков период у наблюдаемой решетки. Локальный максимум расположен на частотах Fx = 40, Fy = 22, соответственно периоды решетки по формуле выше: горизонтальный период Tx = 698/40 = 17, вертикальный период Ty = 652/22 = 30. Что соответствует периоду «колебаний» полосок по горизонтали и соответственно по вертикали.
Отнеситесь с пониманием к этому экскурсу в геометрию, потому что далее я уже не буду подробно комментировать каким образом по пространственной частоте будет определяться период.
Анализ двумерного спектра изображения антенны РЛС
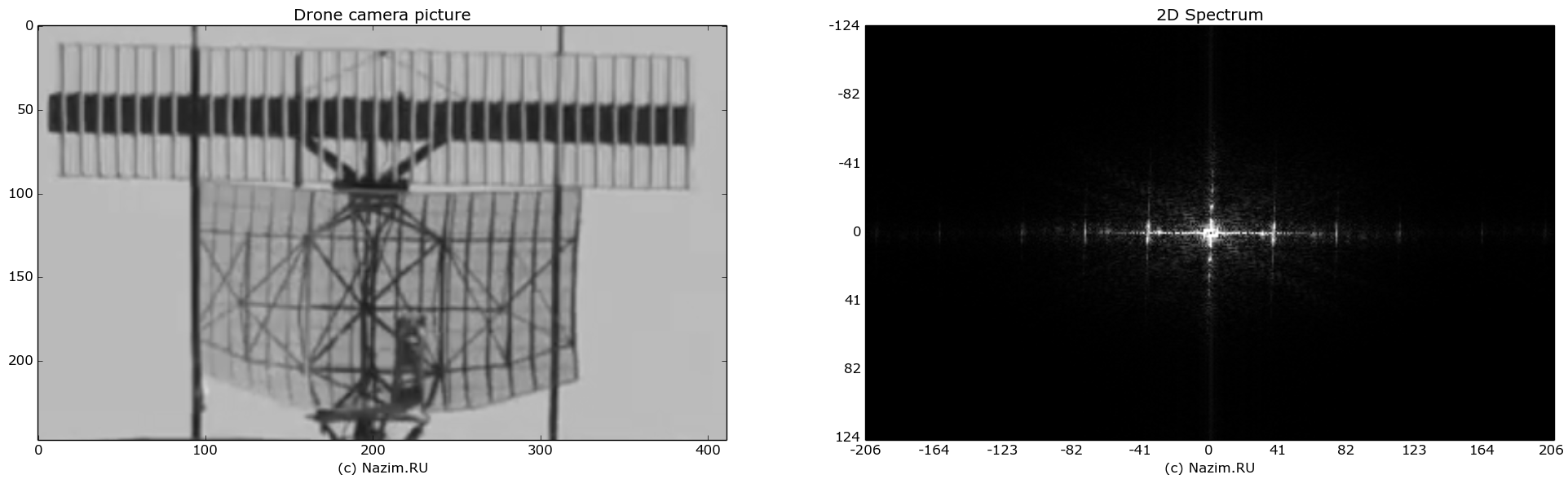
Двумерный спектр антенной системы радиолокатора. Локальным максимумам соответствуют точки с максимальной яркостью
Эта картинка будет немного посложнее предыдущей. Но это с какой стороны посмотреть — например, отсутствие спектральных диагональных максимумов говорит о том, что на изображении в основном и целом все строго поперечно-вертикально. Что собственно и должно быть у антенной решетки радиолокатора, которая юстируется строго горизонтально.
Кроме этого, изображение не очень четкое, поэтому будем считать что дрон наблюдает РЛС с дальнего расстояния и пробует определить, что это перед ним.
Размер картинки (пригодится при определении периодов решетки): Nx = 412, Ny = 248.
Значения локальных максимумов пространственной частоты например по оси X, которые могут нас заинтересовать: 31, 76.
В начале займемся Fx = 31, потому что это самый сильный пик. Соответствующий этой пространственной частоте пространственный период Tx = 13px (если вы не понимаете как это было получено значит пропустили подробное объяснение в предыдущем разделе). Что на кадре антенны чередуется с таким периодом по горизонтали? Это как раз вертикальные секции как на верхней, так и на нижней антенне. Их период приблизительно совпадает, но не совсем. В верхней решетке период повторения вертикальных элементов несколько чаще, поэтому нам нужен более точный анализ. Для этого сделаем два горизонтальных сечения исходных данных:
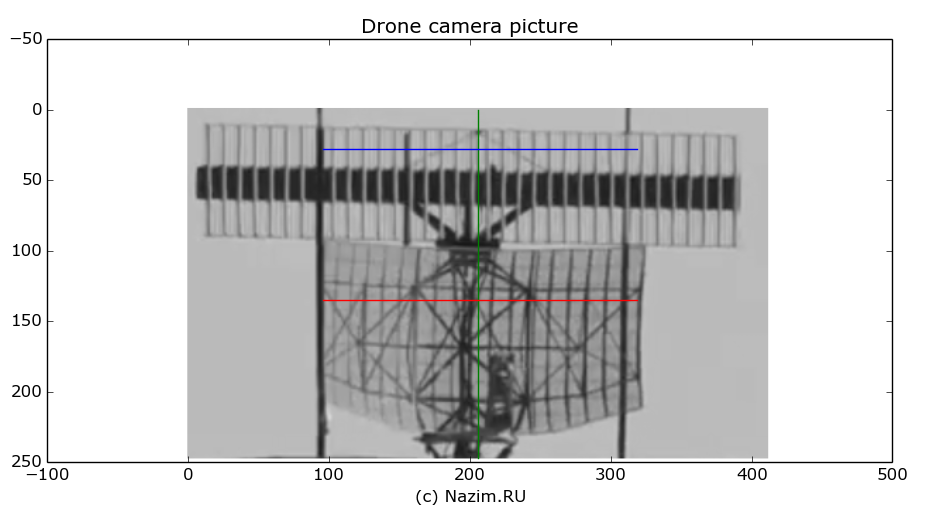
Одномерные сечения по оси X, в результате которых формируется одномерный сигнал для более точного анализа спектра антенной решетки
и найдем одномерный спектр для каждого из сечений. Сечение, выполненное для верхней решетки, как и соответствующие ему сигналы и спектр имеют синий цвет, аналогично сечение для нижней решетки имеет красный цвет.
В результате имеем два сигнала с очевидной разницей в периоде повторения, и уже окончательную картинку дает спектр (масштаб по оси ординат логарифмический):
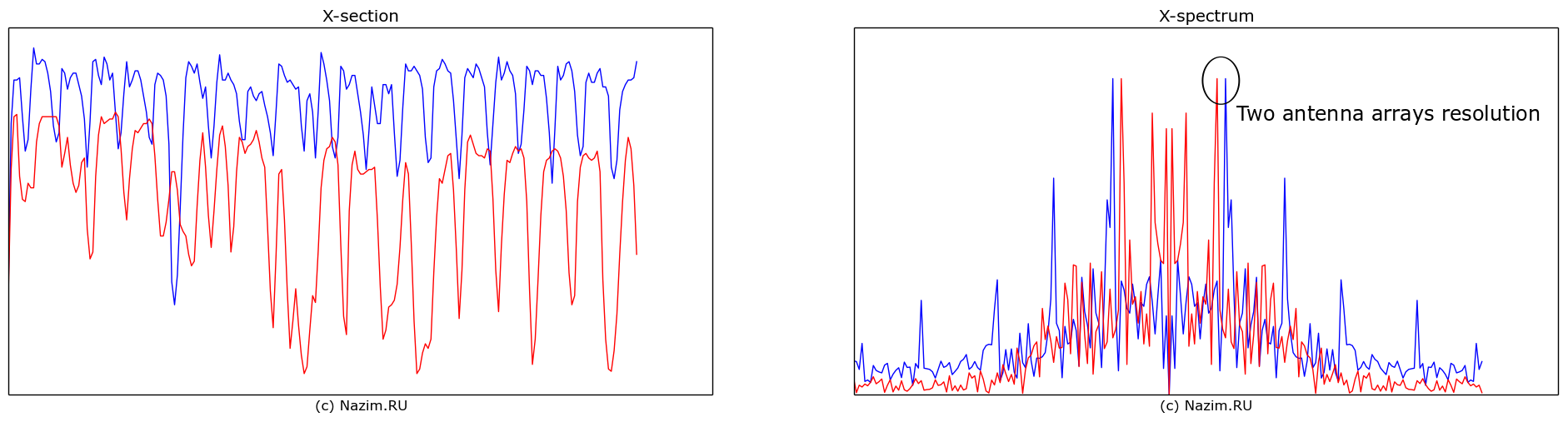
Спектр одномерных сечений для верхней и нижней решетки антенны РЛС. На спектре отмечена разница в максимуме пространственной частоты, которая говорит о различном периоде решеток
Из этого следует важный вывод. Фактически, мы определили одну из сигнатур данного типа антенной системы радиолокатора, когда по двум спектральным составляющим, расположенных рядом, мы однозначно автоматически идентифицируем наличие двух вертикально расположенных решеток с заранее известной константой, соответствующей отношению их периодов повторения или пространственных частот.
Теперь, когда мы получили два независимых друг от друга сечения, обратим внимание на следующий сильный пик спектра верхней решетки, расположенный на удвоенной частоте по отношению к пространственной частоте самой решетки. Откуда взялась эта гармоника? Если мы внимательно посмотрим на кадр, то увидим, что из-за того что вертикальные вибраторы антенны подсвечены сбоку, они содержат светлые и темные полосы. А это уже удвоение частоты! Вот за что я люблю реальные данные — в них всегда можно что-нибудь неожиданное. Так у нас появляется уже вторая сигнатура. Копнем чуть глубже: в зависимости от угла поворота антенны РЛС свойства этой гармоники будут меняться, а это уже следующая сигнатура.
Аналогично, пространственные частоты по оси Y указывают на наличие регулярной структуры по вертикали. Для нее точно также определяется период повторения элементов антенной системы.
Обнаружение вращения антенной системы радиолокатора
Видеокамера БЛА наблюдает фактически проекцию изображения антенной системы радиолокатора. В силу этого, в результате вращения антенны наблюдаемый период повторения элементов антенной решетки будет сокращаться по сравнению с фронтальным представлением, пока не схлопнется под углом 90°. Раз меняется период — меняется и пространственная частота.
Посмотрим, как это выглядит на изображении. Для того чтобы оставить только существенные данные, будем пользоваться горизонтальным сечением. И антенну локатора возьмем другую.
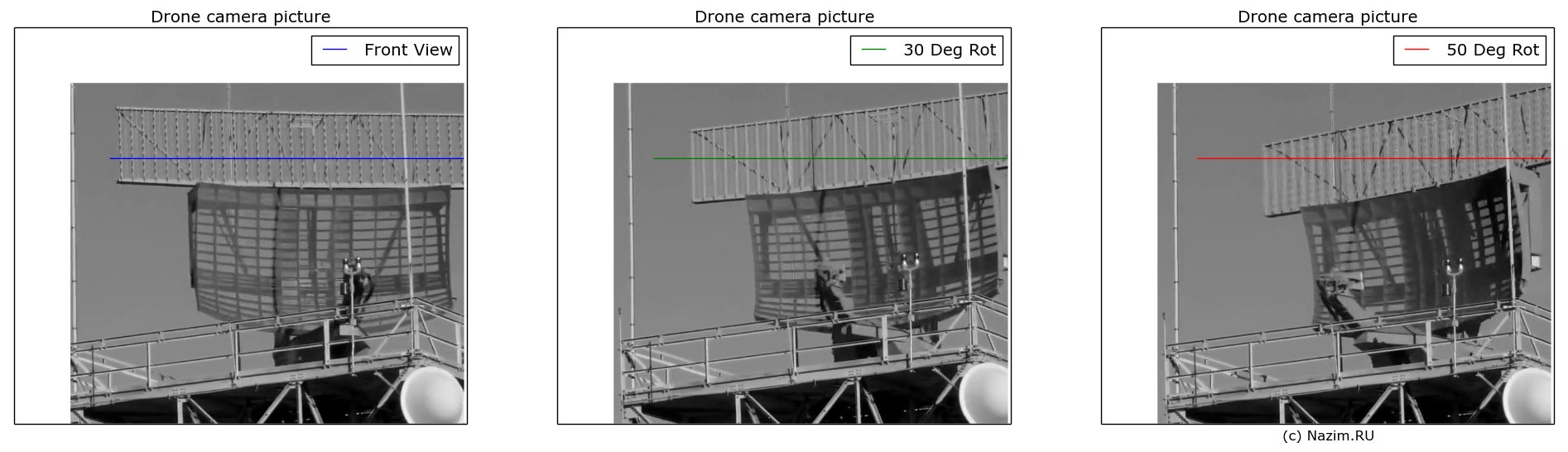
Сечения для различных углов поворота антенны радиолокатора
Представлены кадры для разных углов поворота антенны, каждому углу соответствует свой цвет. Пространственные спектры для каждого из углов сведены в один график:
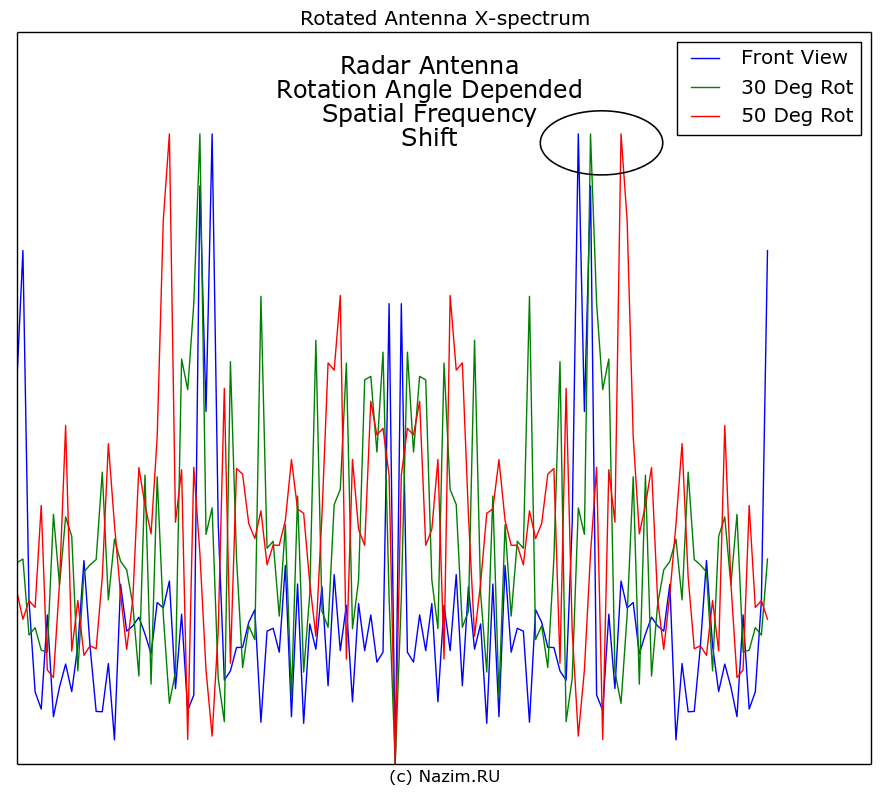
Графики спектров для различных углов поворота антенны локатора. На графике отмечен сдвиг максимума вправо — увеличение пространственной частоты в результате вращения антенны, начиная с фронтального положения
Из графика следует, что локальный максимум пространственной частоты, соответствующий периоду регулярной антенной решетки (в месте проведения сечения), по мере поворота смещается в область более высоких пространственных частот. Следовательно, мы получили одну сигнатуру, которая определяет смещение локального пика по частоте с периодичностью вращения антенной системы радиолокатора.
Более наглядно процесс обработки визуальных данных вращающейся антенны локатора показан на видео. В верхней части показано окно камеры. Две горизонтальные линии показывают сечения изображения для получения спектра FFT. В нижнем окне показаны значения этих спектров: желтым цветом для верхней антенны и красным для нижней.
В процессе вращения антенны хорошо видно как меняется положение пространственных частот, соответствующих регулярной антенной решетки антенн.
Подведем итог
Оснащая визуальную систему зрения беспилотного летательного аппарата системой обработки данных, использующей пространственные спектры изображения, мы можем формировать сигнатуры, свидетельствующие о наличии регулярных структур, в частности антенных решеток радиолокационных станций. Минимальный набор сигнатур может говорить о следующем:
- периодичности расположения элементов антенной решетки, в зависимости от дальности до РЛС;
- конструктивном исполнении антенны, в частности возможно опознать антенну состоящую из двух решеток;
- выявить дополнительные элементы несущей конструкции, которые вносят вклад в пространственный спектр;
- сжатие и растяжение пространственного спектра указывает на вращение антенны радиолокатора; на основе этой сигнатуры также определяется частота вращения.
Можно было бы предположить, что простейшим средством защиты от обнаружения может служить нанесение маскировочного рисунка. Однако, сам рисунок, будучи легко опознаваемым элементом, также может быть использован для обнаружения.
Конечно, ограниченный формат статьи оставил за бортом некоторые интересные вещи, такие например как использование ограниченного набора сечений. Фактически, сечениями мы формируем выборку сигнала, и если она будет достаточно узкополосной в смысле пространственных частот, их количество можно сделать ограниченным — получится аналог теоремы Котельникова, только в пространственной области.
Ну и другие интересные вещи, которые позволят улучшить характеристики обнаружения, в частности Data Fusion с данными бортового радиопеленгатора излучения РЛС, также расположенного на борту БЛА. Комплексирование визуальных и радиоданных позволит уверенно различать радиолокационные ловушки и продолжить опознавание РЛС в том случае, когда она прекратила работу на излучение.
У нас неудобно вышло, когда к нам корреспонденты приехали фильм к юбилею снимать. Матёрые радиолокаторщики позировали с паяльником и дымящейся канифолью, но не сообразили отключить первичку локатора, квадрик при съёмке панорамы упал ;(. Не дешёвый, думается квадрик был.
Еще бы, как и здесь:
https://youtu.be/CVQScgKR2yg
народ удивляется что с картинкой видео когда локатор чикает по камере.
Скорее всего в вашем случае не только кратковременно пропадала связь, а приемный тракт не выдержал прямого попадания и выгорел )
Конечно, в случае реального применения нужно делать экранировку. Если диаграмма локатора в вертикальной плоскости близка к косекансной, выше угла 30 градусов излучение будет поменьше. После обнаружения локатора не обязательно подлетать к нему ближе в зоне действия основного лепестка; можно занять высоту на которой излучение не будет создавать помех.
Не, там прям в антенну хотели заглянуть, Лира-Т выглядит всё-таки несколько эпично и стимпанковски, говорят, квадрик рухнул сразу, как антенна на него навелась. Дальнейшую судьбу квадрика не знаю, может действительно обошлось только небольшими потерями.
Про ДНА понятно, но могут быть и всякие переотражения от местника.
Прямо в антенну это было серьезно. Электроника отказала само собой, там еще наверное и двигатели от импульса остановились )